![]()
![]()
|
|
泰兴减速机专业生产厂家泰强减速机2019年9月25日讯 针对RV减速机在使用过程中出现的共振问题,利用有限元分析软件 ANSYS 对 RV 减速机内部的核心部件摆线轮进行了自由模态和约束模态分析,通过分析对比两种模态下前 20 阶固有模态和固有振型,得出了摆线轮结构的薄弱环节位于摆线轮齿廓处,找到了容易引起共振的 6 阶固有频率分别为673.19 Hz、755.95 Hz、932.35 Hz、1489.7 Hz、1719.1 Hz、1733.2 Hz,对摆线轮进行设计时应该避开以上频率,为进一步研究 RV 减速机的振动和噪声特性提供了理论依据。
关键词:工业机器人;摆线轮;模态分析;ANSYS
工业机器人作为我国制造业转型升级的重要设备,被广泛应用于装备制造、航空航天、医疗康复等重大领域,特别是在当前“中国制造2025”助力推动下,工业机器人正向着信息技术与制造技术深度融合的方向发展,由此也对工业机器人性能、精度、可靠性提出了更高的要求[1]。RV 减速机是由摆线针轮传动基础上发展起来的一种新型减速机构。具有体积小、传动精度高、转动惯量小、承载能力大等诸多优点多应用于工业机器人关节处,以保证机器人的动力学性能。在实际工作情况下,机器人伺服电机的工作频率往往受定子、转子、以及磁场的影响而增大, 所以仅避开电机的在工作转速下的回转频率是不准确的[2]。因此为了避免共振现象的发生,了解 RV 减速机重要部件的动态特性并对其进行模态分析就显得尤为重要。
目前针对 RV减速机动力学分析的报道很多[3-5],但因非特定型号模型的区别导致结果往往存在很大的差异。本文以 2K -V型减速机为研究对象,建立了R V 减速机的摆线轮模型,利用ANSS 有限元分析软件进行约束模态和自由模态分析,得到前 20 阶固有频率,并对计算结果进行了分析和总结,为相关研究提供了依据。
1 有限元模型的建立
1.1 摆线轮参数化建模
本文中以2K-V型减速机为研究对象,使用SolidWorks 参数化建模方法建立摆线轮三维模型,摆线轮主要技术参数如表 1 所示。
表1 摆线轮主要技术参数

绘制摆线轮齿廓的参数方程通常可用式(1)和式(2)表示:

式中:x0 、y0 为摆线轮齿廓参数方程的横纵坐标,mm ;t 为自变量,rad。
利用以上数据得到摆线轮廓方程 输入 SolidWo rks 中进行完成摆线轮廓的绘制。减速机输入轴中心孔径为 52 mm,并以直径为 55 mm 的圆 孔结构均布于直径为 120 mm 的圆周上,得到摆线轮的实体模型如图 1 所示。
1.2 网格划分
摆线轮的材料设置为轴承钢,按实际属性设定弹性模量为 E=213 GPa,泊松比 μ=0.292,密度为 ρ=7850 kg/m³。采用 Solid186 单元进行智能网格划分,大小设置为 2 mm,SOLID186是一个高阶 3 维 20 节点固体结构单元,单元通过20 个节点来定义。Solid186可以具有任意空间的各向异性,单元支持塑性、超弹性、蠕变、应力钢化、大变形和大应变能力[σ]。模型划分网格数 64130,节点数为 288035。网格划分模型如图 2 所示。

图1 摆线轮实体模型
2 有限元模态分析
为了更加深入的对摆线轮模态进行理解和比较,本文采用子空间迭代法[7]分别对摆线轮的自由模态和约束模态进行了提取,选取对结构动态特性影响较大的低阶振型进行分析总结。

图2 摆线轮网格模型
2.1 自由模态分析
自由模态分析求解的是摆线轮在不施加任何约束状态下的固有特性。由于在自由状态下,前6 阶模态属于刚体位移模态,固有频率为 0[8],所以在分析过程中不加以考虑。因此取 7 ~20阶的频率与振型进行分析。得到的固有频率和最大位移如表 2 所示。第 7、9 、10、14、5、17 阶振型云图如图 3~图 8 所示。
从表 2 中数据可以看出,相邻阶出现频率相近甚至相等的情况。如 7 和 8、10 和 11 、15和 16,说明它们是系统振动方程解的重根。由振型云图可见,第 阶振型中摆线轮绕 X 轴向发生弯曲变形;第 9 阶振型中心孔沿 Z 轴正向发生严重了伸缩变形;第 10 阶振型沿 Y 轴方向发生了严重的伸缩变形;第 14 阶振型中三个扇形输出轴孔沿中心孔方向发生了严重的伸缩变形;第 15 阶振型中心孔沿 X 轴正向与 Y 轴正向角分线方向发生严重的扭转变形;第 17 阶振型摆线轮沿 X 轴和 Y 轴方向均发生严重的伸缩变形。

2.2 约束模态分析
约束模态分析是通过建立约束条件来反映零件之间的相互约束关系,能够近似的反映摆线轮在实际工作情况下的动态性能。摆线轮在运动过程中,与中间孔的输入轴无相互接触,而是主要受到与之配合安装的 3 个转臂轴承的作用,且转臂轴承与摆线轮相互作用的面积一般小于整体接触面积的一半。因此选择接触面积的一半施加轴向和径向约束。取前 20 阶模态计算结果,得到固有频率和最大位移如表 3 所示。第 3、6、8、13、15、19 阶的振型云图如图 9~图 14 所示。
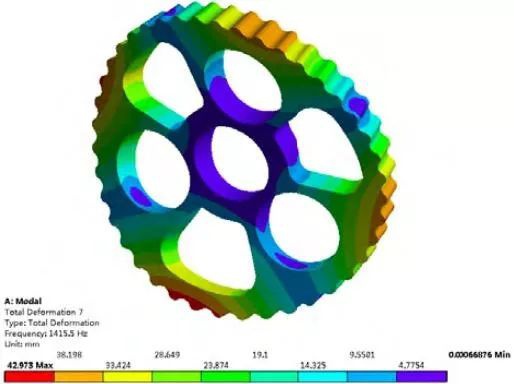
图3 第 7 阶振型云图
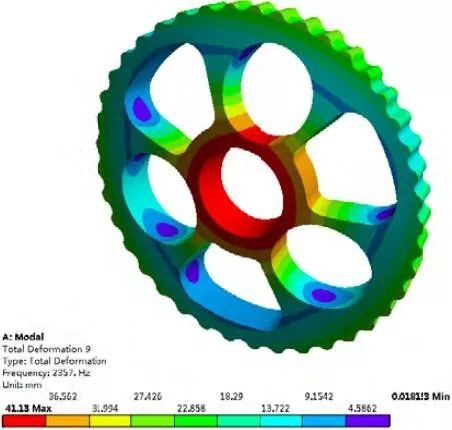
图4 第 9 阶振型云图
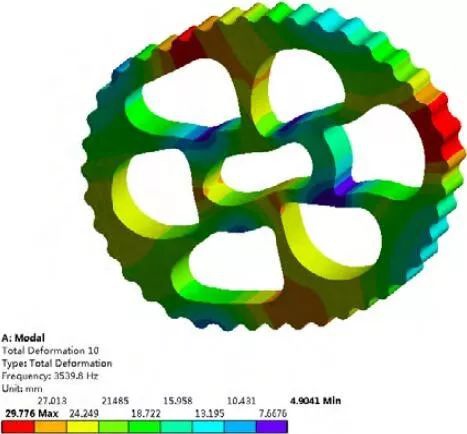
图5 第 10 阶振型云图
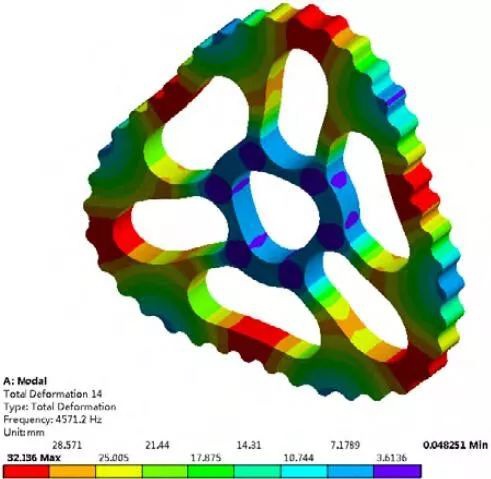
图6 第 14 阶振型云图
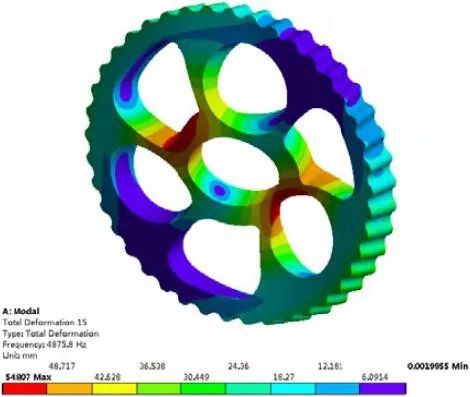
图7 第 15 阶振型云图(自由模态)
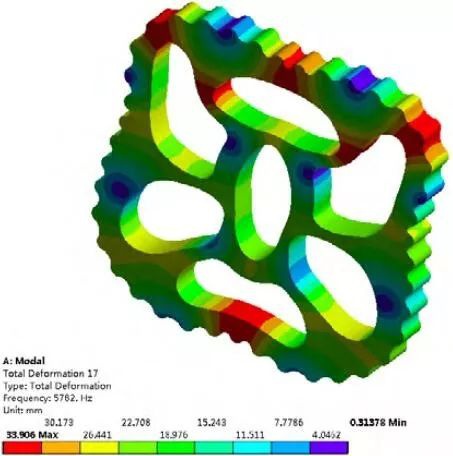
图8 第 17 阶振型云图
由振型云图可见,第 3 阶振型 X 轴正向外沿处发生弯曲变形;第 6 阶振型上端两输出轴孔位外沿发生 Y 轴正向的弯曲变形;第 8 阶振型中左上端输出轴孔外沿向中心孔发生伸缩变形,同时中心孔绕 Z 轴发生了扭转变形;第 13阶振型中三个轴承孔分别沿中心孔方向发生了严重的伸缩变形;第 15 阶振型中心孔沿 Y 轴发生了扭转变形和伸缩变形;第 19 阶振型中心孔沿 Y 轴发生了扭转变形,同时摆线轮外沿沿 X 轴和 Y 轴向中心孔发生了严重的伸缩变形。

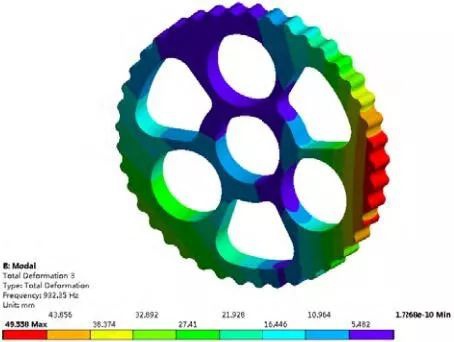
图9 第 3 阶振型云图

图10 第 6 阶振型云图
3 分析结果对比
根据上述分析结果,忽略自由约束前 6 阶数据,以第 7 阶为起始频率并与约束模态下的计算频率相比较,如图 15 所示,可以看出摆线轮在约束模态下的固有频率普遍低于自由模态下固有频率,即约束模态整体固有频率向低频方向发展,这主要是由于在约束条件下摆线轮整体刚度分布不均匀导致的。在摆臂轴承约束处刚度较好,而其他非直接约束部分刚度相对变差,因此频率相比自由条件下的频率变低。
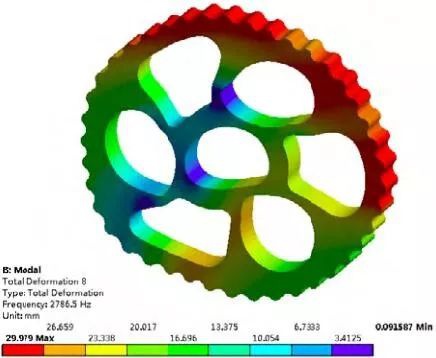
图11 第8阶振型云图
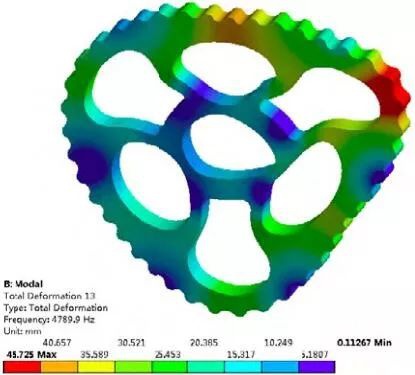
图12 第13阶振型云图
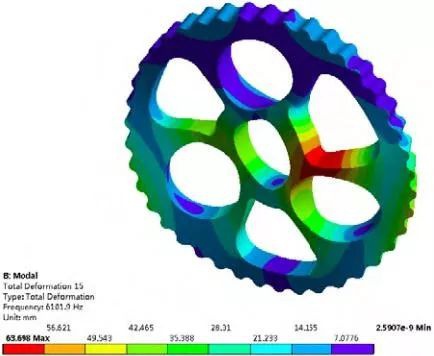
图13 第15阶振型云图(约束模态)
由表2和表3数据可知,自由模态 16 阶与约束模态 17 阶出现了相似的振动情况,而约束模态 17 阶的固有频率与自由模态第 19 阶的固有频率几乎相同,即出现了振型交叉的现象。
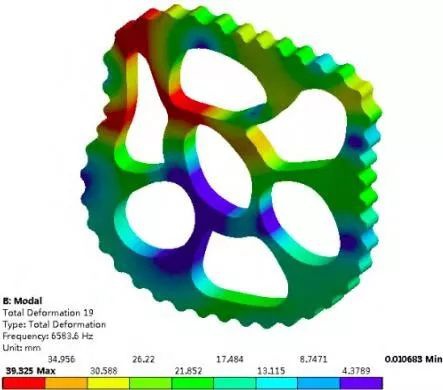
图14 第 19 阶振型云图

自由模态和约束模态下的位移图如图 16 所示。自由模态分析最大位移发生在第 15 阶中心孔与输出轴孔交界处为54.807 mm 。约束模态分析最大位移发生在第 15 阶右侧转臂轴承孔与输出轴孔交界处为 63.698 mm。对自由模态和约束模态前 20 阶整体变形情况分别进行分析,最大集中位移多发生的位置均位于摆线轮齿廓上,局部变形最明显处均位于中心孔与其他孔位的交界处。
从自由模态整体变形情况分析,摆线轮从1阶~20 阶的振型变化依次了经过刚性振动阶段、整体弹性振动阶段和局部弹性振动阶段,而从约束模态变形情况分析,摆线轮的变形跳过了整体弹性振动阶段,即从刚性振动阶段直接转移至局部弹性振动阶段,这也是由于约束模态情况下摆线轮整体刚度分布不均匀导致的。

4 结论
摆线轮在约束模态下的固有频率普遍低于自由模态下固有频率,前 20 阶振型中出现了振型交叉现象,说明摆线轮在工作状态下模态情况较为复杂,自由模态下的各阶振型不能完全反映摆线轮此时的振型和固有频率,所以自由模态各阶振型不能作为其设计参考的依据。
由于低阶振型对结构的影响最大,本文在0~2000 Hz 范围内找到了 673.19 Hz、755.95 Hz、932.35 Hz、1489.7 Hz、1719.1 Hz、1733.2 Hz 的 6 阶主振型,因此在对 RV 减速机进行设计或选择与之配合使用的电机时应该避开这些频率,以避免共振现象的发生。由振型云图可以看出:摆线轮的变形主要发生在摆线轮廓处和各孔位之间的连接处,因此在设计时可以适当提高变形较大处的刚度,减少变形过大带来的结构损伤。
注:此文章在《机械》杂志发表,经作者本人同意发布在“今日减速机”
作者
王德民,别磊,姜俊霞,王京华
长春理工大学 机电工程学院
参考文献:
[1]黎显伟. 码垛机器人的分类及应用[J].机械,2018(45):29-34.
[2]刘海强,赵坚,王达,等. 特种电动机风扇罩结构模态分析[J].制造业自动化,2018(40):41-46.
[3]孟聪,陈川,杨玉虎,等. RV 减速器模态特性分析[J]. 中国机械工程,2018,1(29):9-13.
[4]冯玉宾,徐宏海. RV 减速器参数化建模与模态分析[J].机械设计与制造,2015(12):101-104.
[5]姚辰龙,陈来利. RV 减速器行星架的模态分析[J].机械工程师,2013(3):111-113.
[6]王葵葵,李可,宿磊,袁兵. RV 减速器摆线轮模态分析与结构优化[J]. 包装工程,2017(38):162-167.
[7]项林. 汽车前轴静动态有限元分析[D].南宁:广西大学,2008.
[8]洪学武,赵坚,高志鹏,等. 基于 ANSYS 的数控十字滑台装配体的模态分析[J]. 机械工程师,2016(8):51-53.